We started from hydraulics
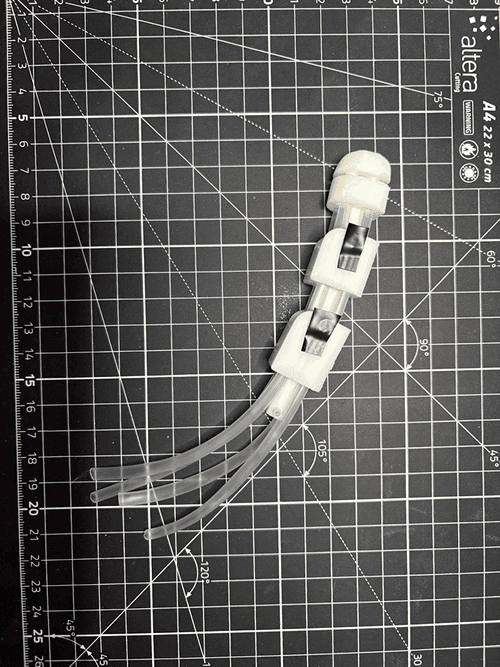
Back in 2023, we built our very first prototype: a single finger driven by a custom hydraulic concept. It wasn’t electric, and it didn’t move on its own, but it gave us our first real insights into force, range, and motion.
This early design focused on pressure control and mechanical feedback. It allowed us to test fundamental ideas about how a future prosthetic hand could feel, move, and respond. There were no expectations, just a starting point and a lot of questions.
That one finger helped define what would become the core of our approach: precision, strength, and expressive control. It challenged our assumptions and pushed us to keep improving.
We’ve made a lot of progress since then, but this first prototype laid the foundation for everything that followed. It was the beginning.